The Sorting Problem
Sorting is a useful task in its own right. Examples:
- Equivalent items are adjacent, allowing rapid duplicate finding.
- Items are in increasing order, allowing binary search.
- Can be converted into various balanced data structures (e.g. BSTs, KD-Trees).
Definition
From Knuth’s TAOCP
An ordering relation $<$ for keys $a$, $b$, and $c$ has the following properties:
- Law of
Trichotomy: Exactly one of $a < b$, $a = b$, $b < a$ is true. - Law of
Transitivity: If $a < b$, and $b < c$ , then $a < c$.
An ordering relation with the properties above is also known as a total order.
A sort is a permutation (re-arrangement) of a sequence of elements that puts the keys into non-decreasing order relative to a given ordering relation.
- $x_1 \leq x_2 \leq x_3 \leq \ldots \leq x_N$
Inversion
Sorting: An Alternate Viewpoint
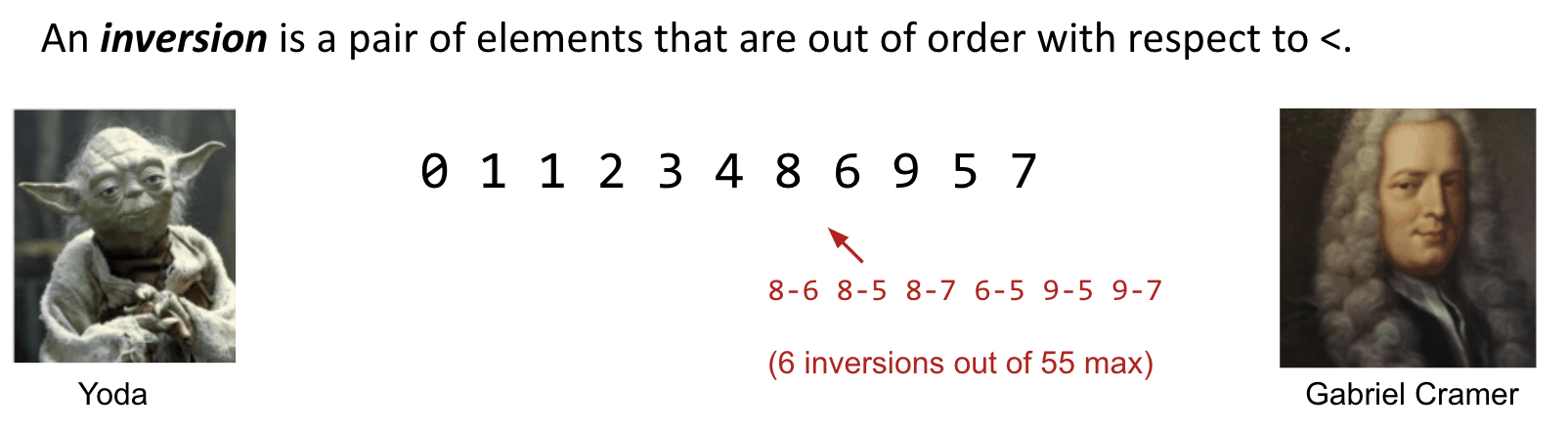
Another way to state the goal of sorting:
- Given a sequence of elements with $Z$ inversions.
- Perform a sequence of operations that reduces inversions to $0$.
Performance Definitions
Characteristics of the runtime efficiency are sometimes called the time complexity. For example, Dijkstra’s has time complexity $O(E\log{V})$.
Characteristics of the “extra” memory usage of an algorithm is sometimes called the space complexity of an algorithm. For example, Dijkstra’s ahs space complexity $\Theta(V)$ (for queue, distTo, edgeTo).
Note: A graph takes up space $\Theta(V + E)$, but we don’t count this as part of the space complexity. We don’t count input, which means it takes $\Theta(1)$ space if no additional space is used.
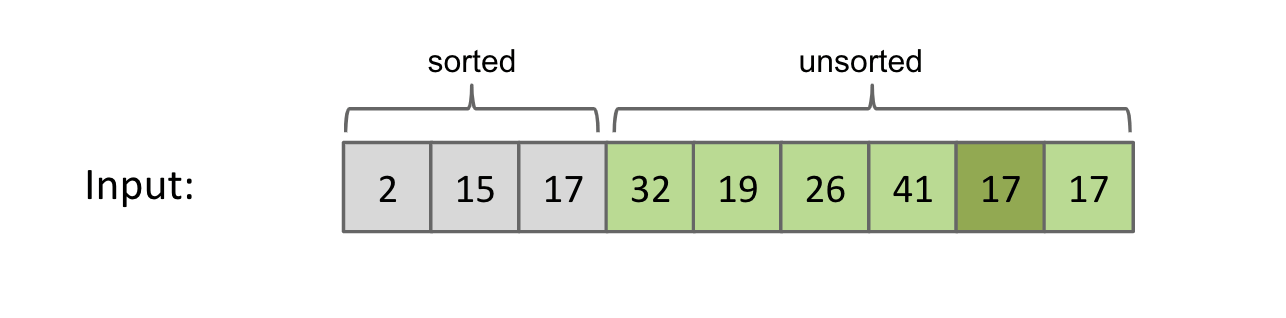
Selection Sort
Idea
Selection sorting $N$ items:
- Find the
smallestitem in theunsorted portionof the array. - Move it to the
endof the sorted portion of the array / the currentheadof the unsorted portion. Selection sortthe remaining unsorted items.
Invariant: Everything in the far left is sorted.
Demo: link
Runtime is $\Theta(N^2)$ if we use an array.
Inefficiency: We look through entire remaining array every time to find the minimum.
Caveat
1 | /* Selection Sort */ |
Range:
i$\in$[0, N)(actually it could be[0, N-1))j$\in$[i + 1, N)
Swap: When update finishes, swap the real min to the initial min position, i.e. i.
Handwriting: link
Code
1 | for (int i = 0; i < N; ++i) { |
Heap Sort
Improvement upon selection sort.
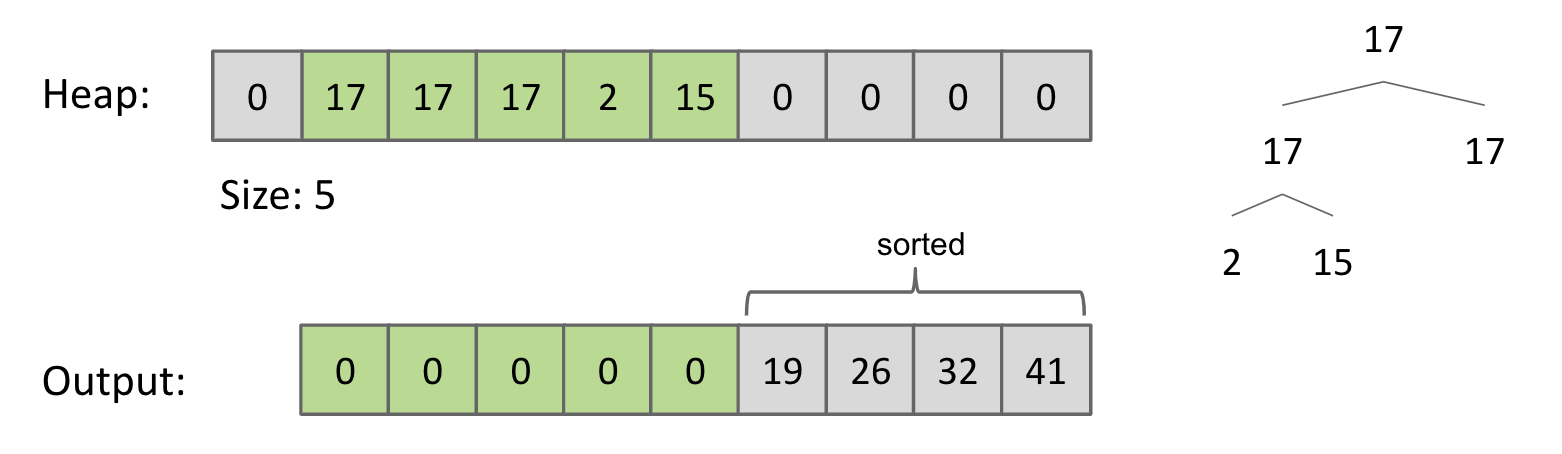
Naive Heap Sort
Idea: Instead of re-scanning entire array looking for minimum, maintain a heap so that getting the minimum is fast.
Naive heapsorting $N$ items:
- Step 1: Insert all items into a
max heap, and discard input array. Create output array. ==> $O(N\log{N})$ - Step 2: Repeat the following $N$ times.
- Delete largest item from the max heap. ==> $O(\log{N})$
- Put largest item at the end of the unused part of the output array. ==> $\Theta(1)$
Demo: link
Note: Memory usage is $\Theta(N)$ (worse than $\Theta(1)$ in selection sort) to build the additional copy of all of our data. However, we can eliminate this extra memory cost by In-Place Heap Sort.
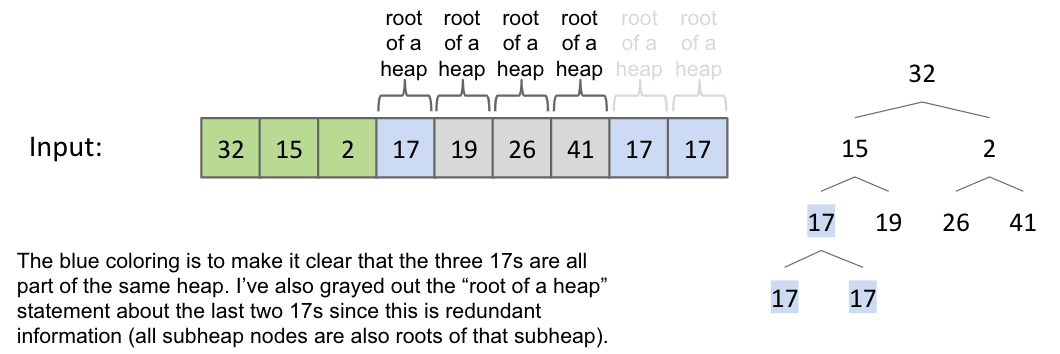
In-place Heap Sort
Wiki: An in-place algorithm is an algorithm which transforms input using no auxiliary data structure. However a small amount of extra storage space is allowed for auxiliary variables.
How do we avoid the $\Theta(N)$ space complexity?
Heap sort $N$ items:
- Step 1: Bottom-up heapify input array. ==> $O(N)$
- Sink nodes in reverse level order:
sink(k) - After sinking, guaranteed that tree rooted at position $k$ is a heap.
- Sink nodes in reverse level order:
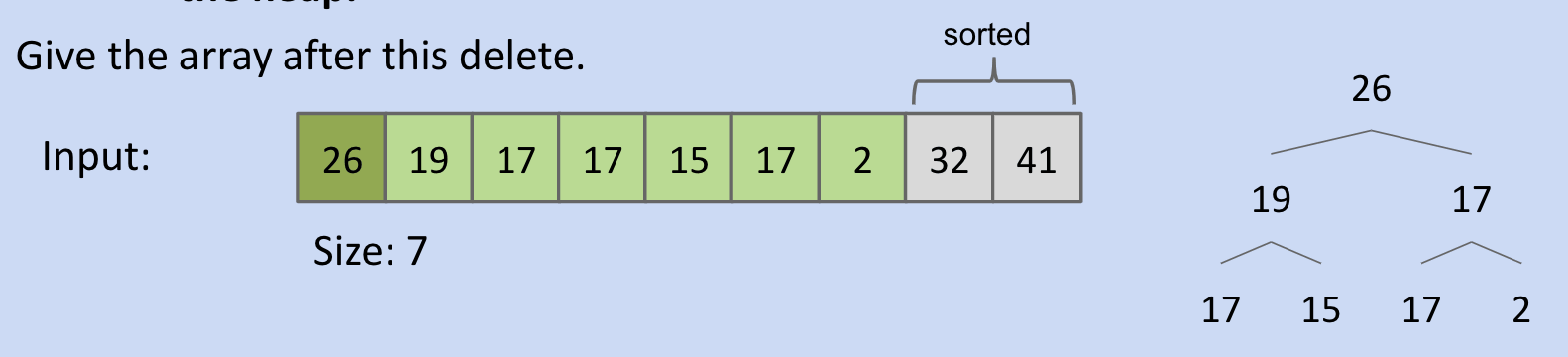
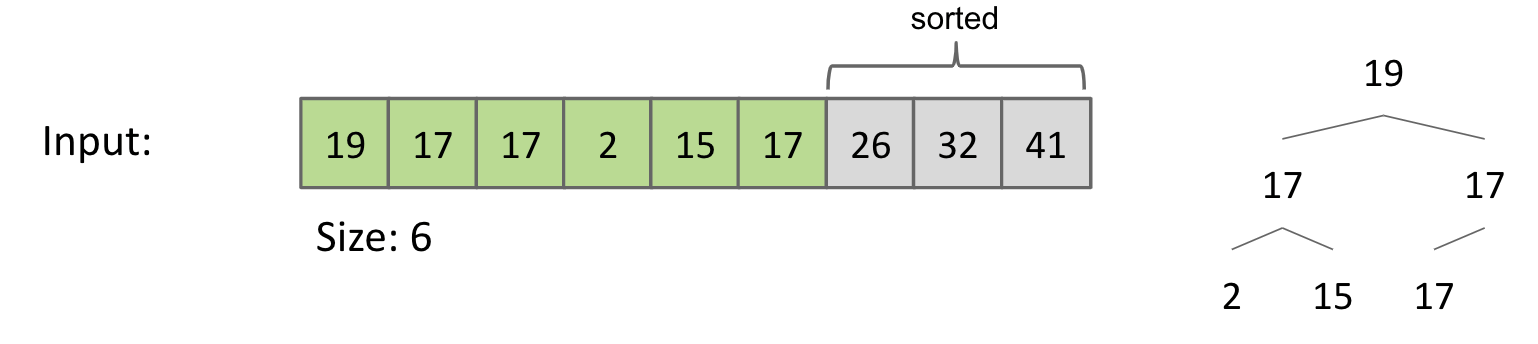
- Step 2: Delete largest item from the max heap. ==> $O(\log{N})$
- Swapping root with the last item in the heap.
- Sink the root if necessary.
Demo: link
Sink(2):
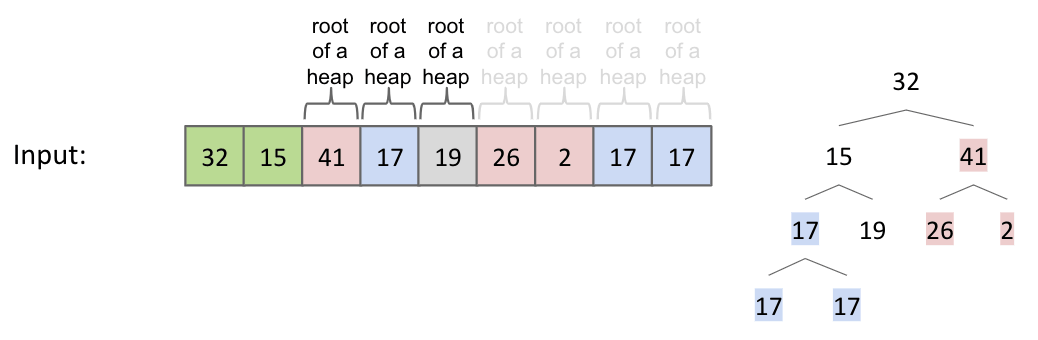
Punchline: Since tree rooted at position $0$ is the root of a heap, then entire array is a heap.
Note: No room to leave an unused spot since it is the original array of length $N$. We will actually use position zero for this algorithm.
Delete largest item and swap:
In-place Heapsort Complexity:
The time complexity of in-place heapsort is $O(N\log{N})$.
- Bottom-up heapification takes $N$ sink operations, each taking no more than $\log{N}$ time. Overall, the bottom-up heapification is $\Theta(N)$ in the worst case.
- Later, there are $N$ sink operations and each takes $O(\log{N})$ time.
The memory complexity is $\Theta(1)$, e.g. size variable.
Note: If we employ recursion to implement various heap operations, space complexity is $\Theta(\log{N})$ due to need to track recursive calls. But the difference between $\Theta(\log{N})$ and $\Theta(1)$ space is effectively nothing.
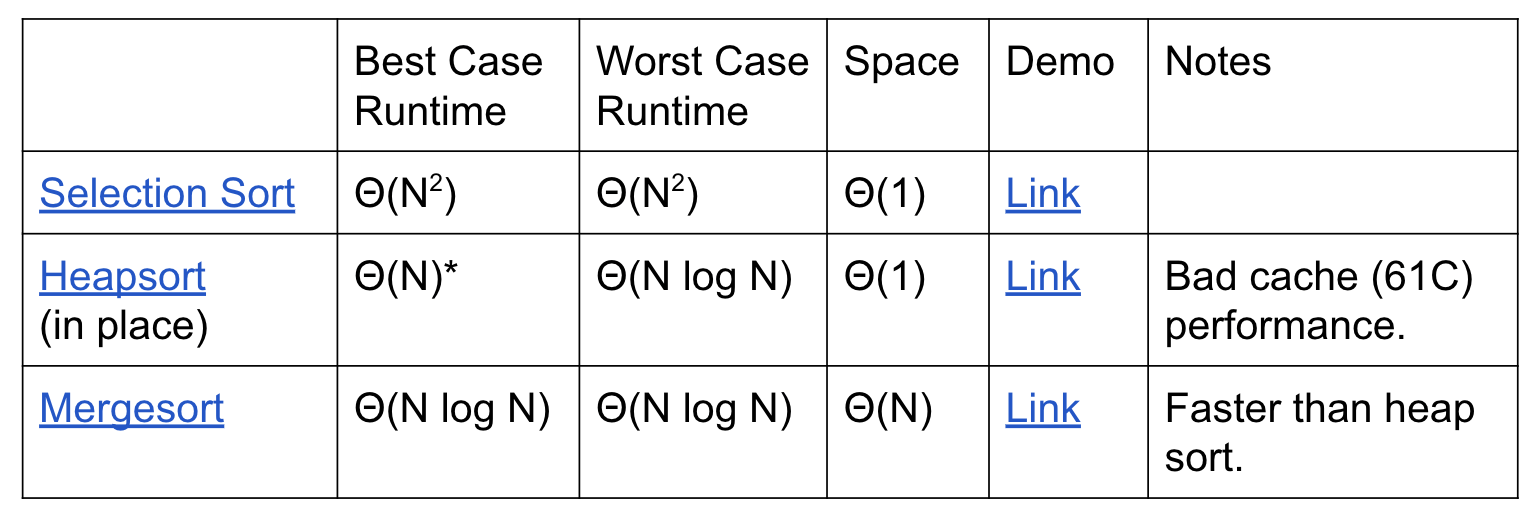
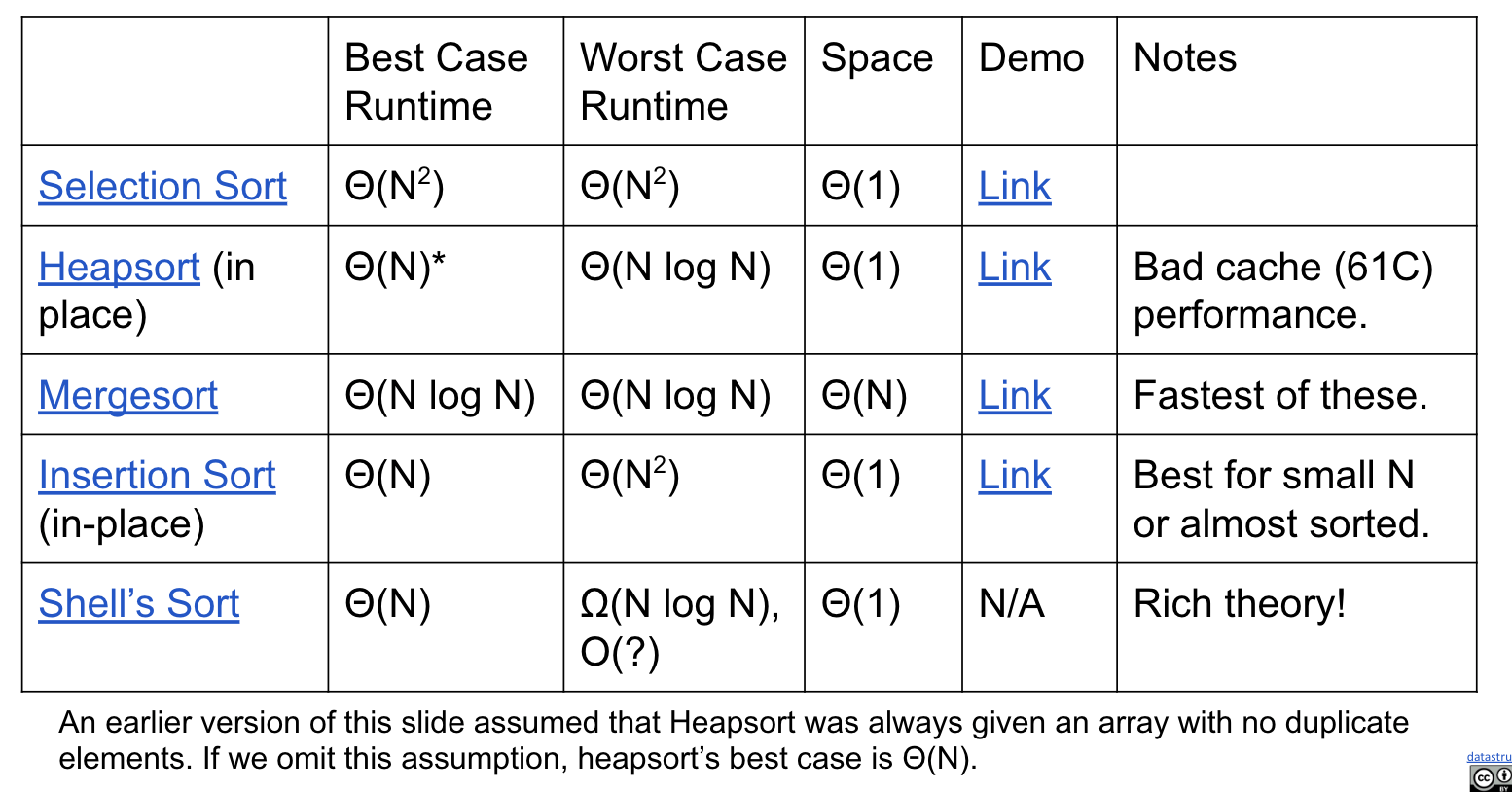
Sorts So Far (why mergesort appears early!?!??!?!??!?!?!?!?!!?!?!):
Merge Sort
Idea
Top-Down merge sorting $N$ items:
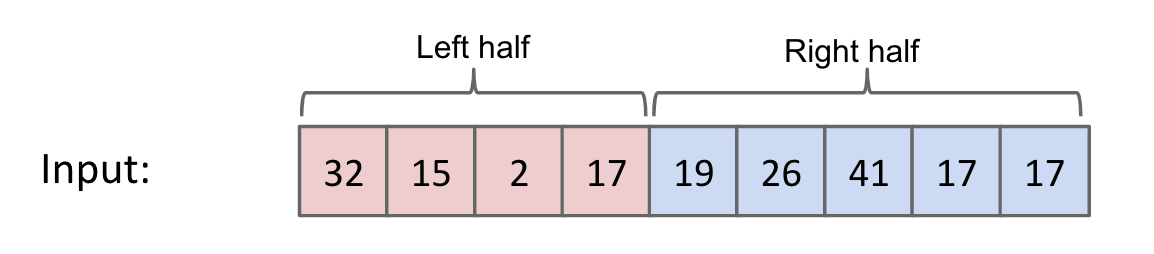
- Split items into $2$ roughly even pieces.
- Mergesort each half. (Recursive!)
- Merge the two sorted halves to form the final result.
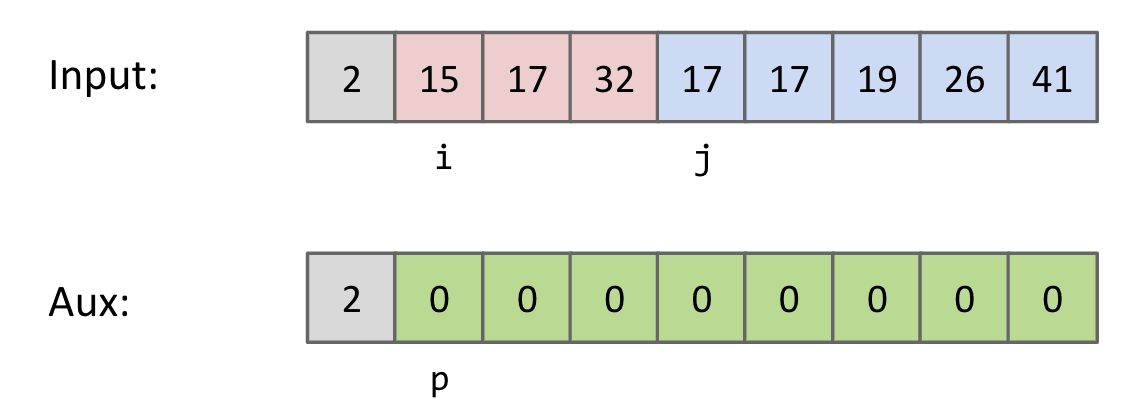
- Compare
input[i] < input[j]. - Copy smaller item and increment
pandiorj.
- Compare
Time complexity: $\Theta(N\log{N})$
Space complexity with aux array: $\Theta(N)$
Note: Also possible to do in-place mergesort, but the algorithm is very complicated, and runtime performance suffers by a significant constant factor.
My Way (Index)
Caveat
Odd and Even Cases:
This idea can also be applied to Quicksort, Binary Search.
mid for odd and even number of items.
1 | /* Even Case: L = 4 */ |
mid = (left + right) / 2 = 1 => Left-Leaningmid = (left + L) / 2 = 2 => Right-Leaning
1 | /* Odd Case: L = 5 */ |
mid = (left + right) / 2 = 2 => Middlemid = (left + L) / 2 = 2 => Middle
Note: In this case, we use (left + right) / 2. So it should be Left-Leaning and we have:
- Left part:
[left, mid] - Right part:
[mid + 1, right]
In merging, initializing a new array is inefficient?
Use a temp array to do merging.
Code
Three-While version:
1 | public static void mergesort(int[] a) { |
For-loop version:
1 | // Note: Be careful about the starting index |
Algs4 (Creation)
Reference: algs4
Caveat
When putting elements from input to b, be careful about the offset.
Code
1 | public static double[] mergesort(double[] input) { |
Insertion Sort
Two Approaches:
- Naive Approach (Move Back)
- In-Place Approach (Swapping)
Naive (Move Back)
Idea
- Starting with an
empty output sequence. - Add each item from input, inserting into output at appropriate position.
Demo: link
If output sequence contains $k$ items, worst cost to insert a single item is $k$. Might need to move everything over.
Caveat
Idea: Find the appropriate pos to insert pivot i. Move back items to provide space.
1 | /* Insertion Sort (Naive) */ |
Range:
i$\in$[1, N)pos$\in$[0, i], from left to right.- So we have
while (pos < i) { pos++; }thatposwill finally stops ati.
- So we have
Moving Condition:
- Know when to stop:
a[pos] > a[i]. - Know when can move:
!(a[pos] > a[i]).- Equivalent to
a[pos] <= a[i].
- Equivalent to
- Combine them we have
while (pos < i && !(a[pos] > a[i])).
1 | /* Move back */ |
Move Back:
- Which items should be moved back:
[pos, i).[pos, i)=>[pos, i - 1]([i - 1]will move to[i])- Move back starting from
right to left. - We have
for (int j = i - 1; j >= pos; --j).
Note: Backup the item before moving back, otherwise it’ll be overwritten.
Handwriting: link
Code
1 | public static void insertionSort(int[] a) { |
In-Place (Swapping)
Idea
Do everything in place using swapping.
- Designate item
i$\in$[1, N)as the traveling item. - Swap item backwards until
travelleris in the right place among all previously examined and sorted items.
Demo: link
Caveat
Idea: Swap a[j - 1] and a[j] when a[j - 1] > a[j].
1 | /* Insertion Sort (Swapping) */ |
Range:
i$\in$[1, N)j$\in$(0, i], from right to left
Handwriting: link
Code
1 | public static void sort(int[] a) { |
Runtime (In-Place)
Two Examples:
The purple letter is the current traveler.
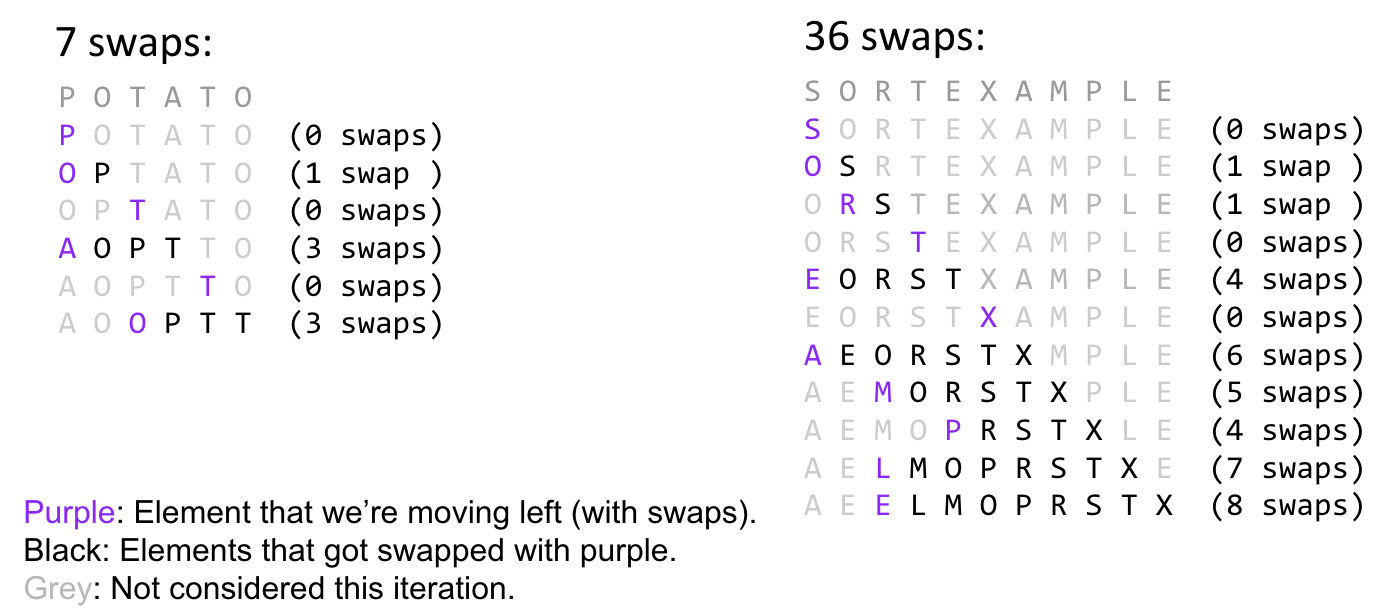
See how the travelers move forward.
Best case: $\Theta(N)$ (almost no inversion)
Worst case: $\Theta(N^2)$ (triangle)
Picking the Best Sort. Suppose we do the following:
- Read 1,000,000 integers from a file into an array of length 1,000,000.
- Mergesort these integers.
- Select one integer randomly and change it.
- Sort using algorithm $X$ of your choice.
- Selection Sort: $O(N^2)$
- Heap Sort: $O(N\log{N})$ (worst)
- Merge Sort: $O(N\log{N})$ (worst)
- Insertion Sort: $O(N^2)$ (X, this one)
Insertion Sort. Because there is only one item out of place. The times of swapping it is linear.
Heap & Merge Sorts are worst in this case since they take $O(N\log{N})$.
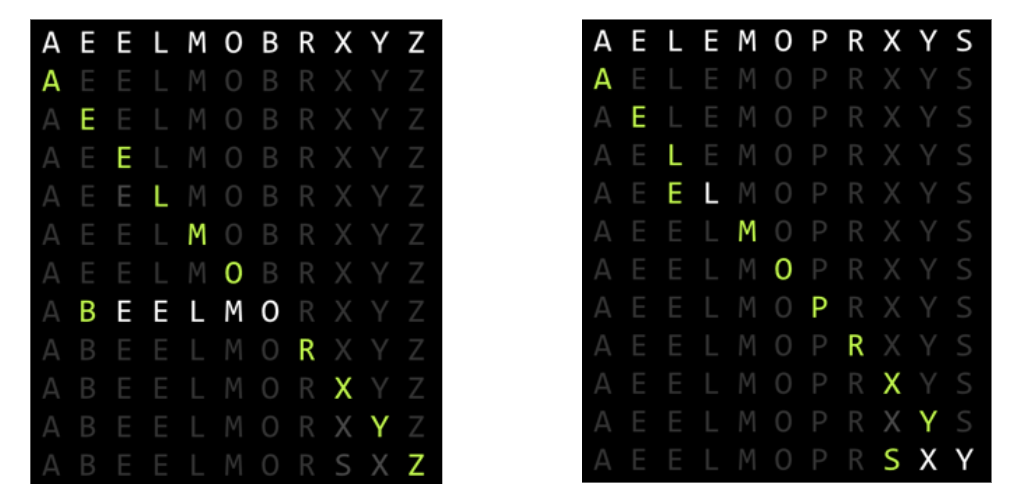
Observation: For arrays that are almost sorted, insertion sort does very little work.
- Left array: 5 inversions => 5 swaps.
- Right array: 3 inversions => 3 swaps.
Why Insertion Sort?
Sweet Spots:
On arrays with a small number of inversions, insertion sort is extremely fast.
- One exchange per inversion (and number of comparisons is similar).
- Runtime is $\Theta(N + K)$ where $K$ is number of inversions.
Less obvious: For small arrays ($N < 15$ or so), insertion sort is fastest.
- More of an
empirical factthan a theoretical one. - Rough Idea: Divide and conquer algorithms like heap sort / merge sort
spend too much time dividing, but insertion sort goes straight to the conquest.
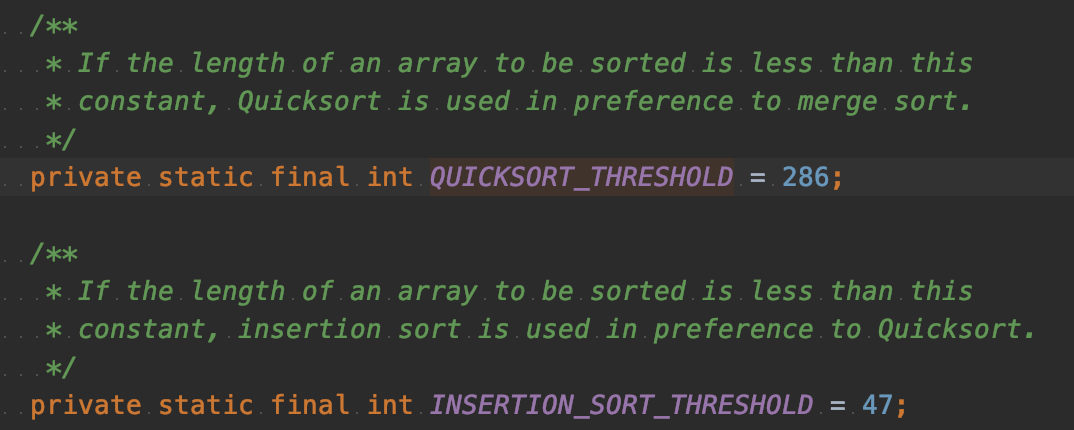
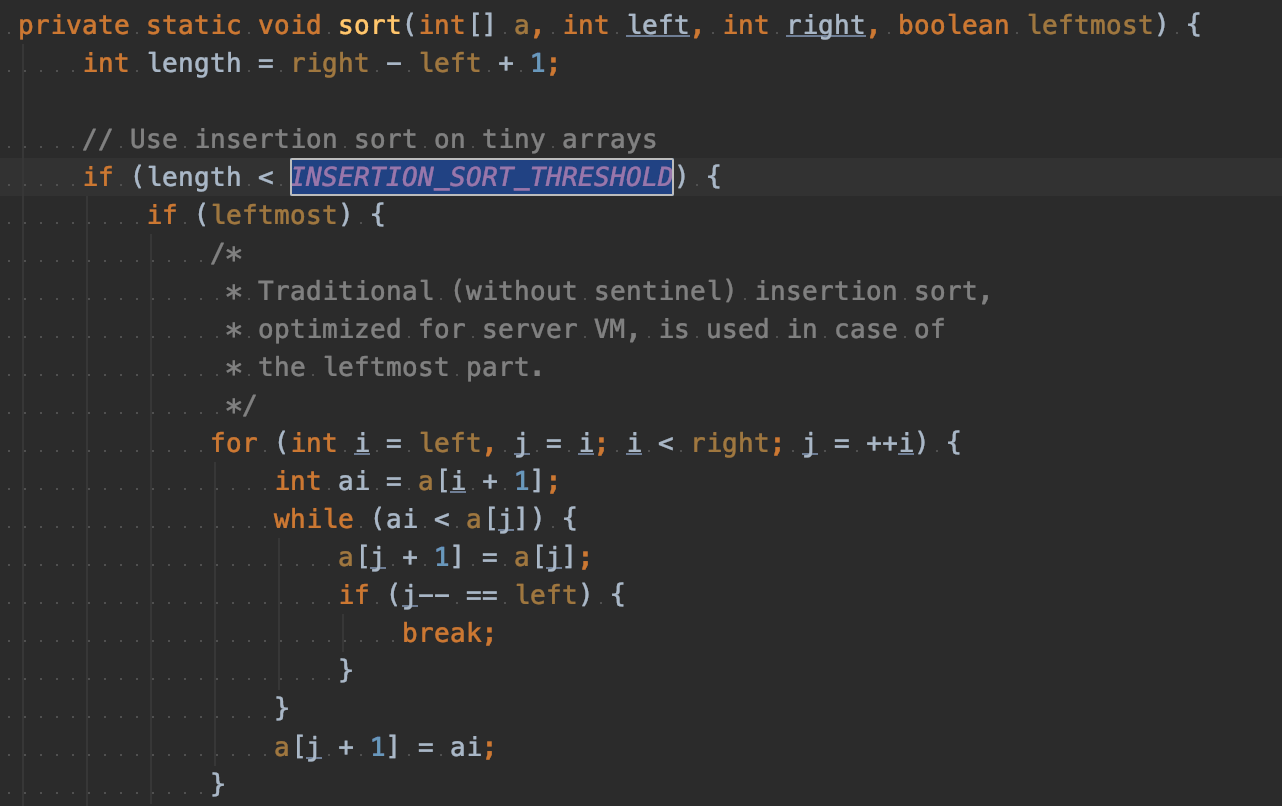
So, in real-world implementation of merge sort or quicksort, once the size of piece of the array is less than 15, it will switch to insertion sort. (below thresholds are different, but the idea is the same)
Shell’s Sort
Or Shellsort.
Idea
[algs4] Insertion sort is slow for large unordered arrays because the only exchanges it does involve adjacent entries, so items can move through the array only one place at a time.
1 | h = 4 |
The idea of shell sort is to rearrange the array to give it the property that taking every h-th entry (starting anywhere) yields a sorted subsequence. Such an array is said to be h-sorted. Put another way, an h-sorted array is h independent sorted subsequences. Therefore, we can move items around in the array long distances. Using such a procedure for any sequence of values of h that ends in 1 will produce a sorted array.
Big Idea: Optimize insertion sort by fixing multiple inversions at once.
- Instead of comparing adjacent items, compare items that are one stride length $h$ apart.
- Start with large stride, and decrease towards 1.
- By using large strides first, fixes most of the inversions.
- Example: $h$ = 7, 3, 1.
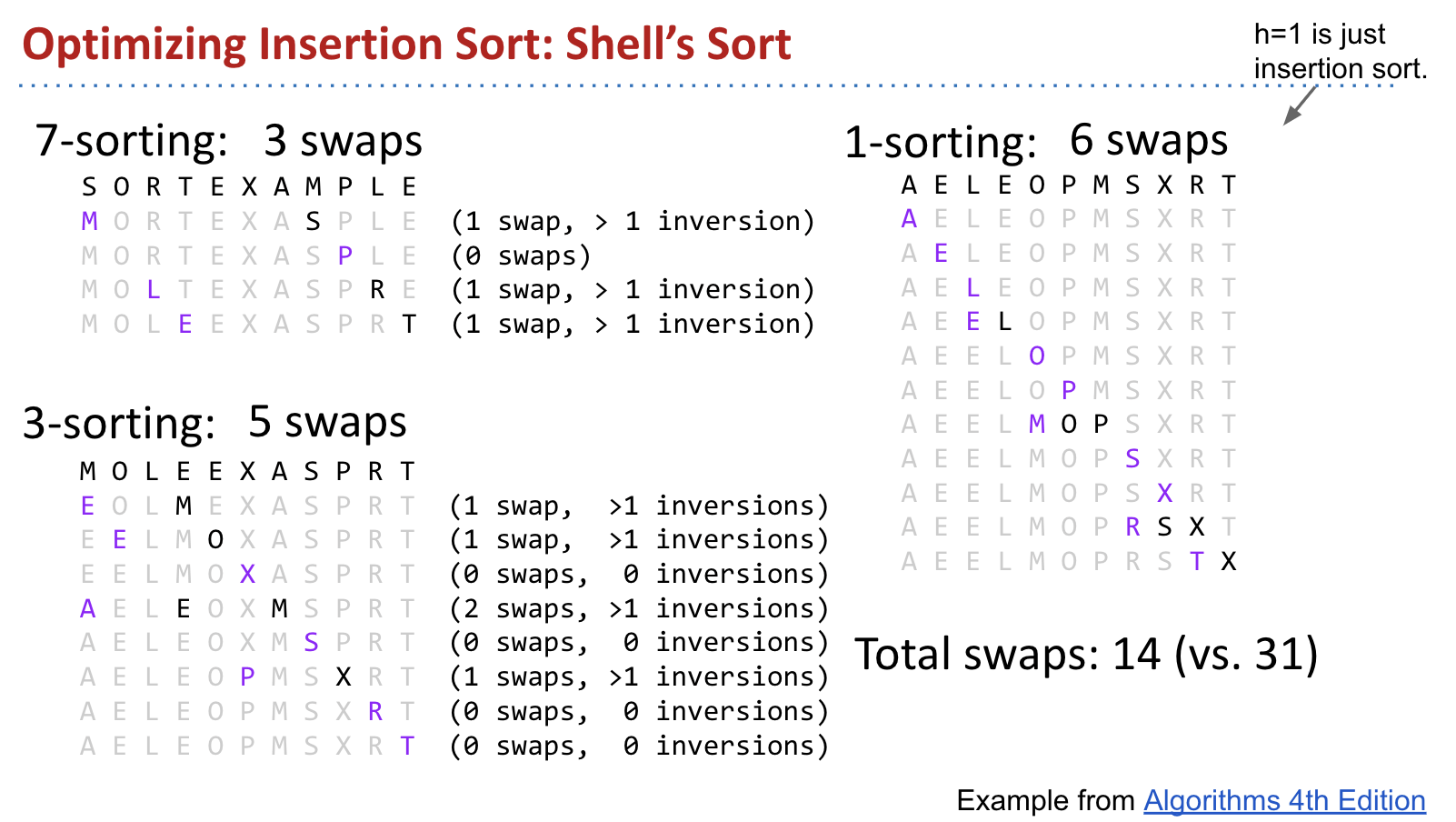
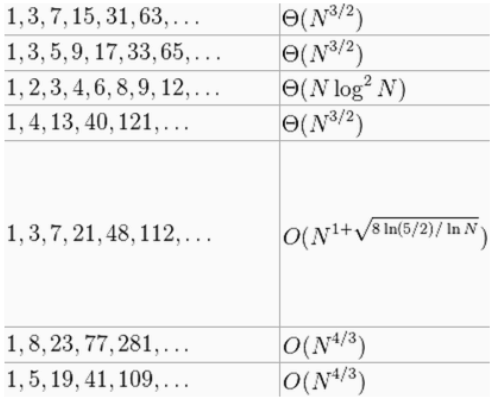
We used 7, 3, 1. Can generalize to $2^k - 1$ from some $k$ down to 1.
Worst-case Runtime: $\Theta(N^{1.5})$
Code
1 | /* |
Sorts So Far
Ex (Guide)
Which sort do you expect to run more quickly on a reversed array, selection sort or insertion sort?
Selection Sort:
1 | 5 4 3 2 1 = N |
Insertion Sort:
1 | 5 4 3 2 1 = 1 |
I think it should be Selection Sort. They both run at $O(N^2)$ (triangle), but Insertion Sort requires too many swapping.